

|
|

|
Промышленный лизинг
Методички
и силы сопротивления в подиипниках не учитывать. Колеса, для которых в таблице радиусы инерции не указаны, считать сплошными однородны.ми дисками. Водила (кривошипы) рассматривать как топкие однородные стержни. Принять, что в вариантах 6, 9, И, 20, 22 и 30 механизм расположен в горизонтальной плоскости. Пример выполнения задания. Дано: массы тел / и 2 механической системь! (рис. 216): ту = т, = 5т (тело / считать материальной точкой); Р~ постоянная сила, приложенная к телу 2 (тело 2 может двигаться только поступательно вдоль линии действия силы Р); Ь - коэффициент пропорциональности в выражении силы сопротивления относительному движению тел / и 2; = - bv, где и -относительная скорость тел. Коэффициент трения скольжения (тела 2) / = 0. 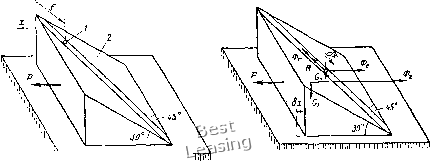 mii,!:ii;i:,:;i,i;i::ii:,i,i!ii!iiiiii:iCTi Рис 216 Рис. 217 Найти уравнения движения системы в обобще1Ц1Ых координатах qi = x, .2 = ё (рис. 216) при начальных условиях: Решение. Воспользуе,мся общим уравнением динамики. Покажем задаваемые (активные) силы: силы тяжести тел / (шарика) и 2 - Gy и Gg, силу Р, а также силу U сопротивления движению шарика по желобу (рис.-*217). Со стороны шарика на тело 2 действует сила R= - R, которая на рисунке не показана. Приложим силы инерции. Сила инерции тела 2, движущегося поступателыга с ускорением Ша, выражается вектором Фа = - mw,. Ускорение шарика / складывается из относительного Wr и пере- ilOCHOrO Wf = w2- Соответственно покажем две составляющие силы инерции шарика Фг = - mWr W Фе=-ТПуХШ,. Для того чтобы получить уравнение движения системы, применим принцигцналоженн*~дополнительных связей (принцип затвердения). Мысленно закрепив тело 2, сообн-чм шарику / возможное перемещение 6 и составим общее уравнение динамики: GM cos (Gi, т -(R + Фг) Ь1 + ФМ cos (Ф„ Ь1) = 0. Имея в виду, что cos(Gi, 6£) = sin30°sin45°; cos (Ф„ б) = cos 30° sin 45% получим mg sin 30° sin 45° - b - flzj-f rnx cos 30° sin 45° = 0 l-\-{blm)-l-{YlA)-x = gY2lA. (1) Теперь мысленно закрепив шарик / в желобе, сообщим телу 2 возможное перемещение hx. Общее уравнение динамики в этом случае имеет вид: (Р-Ф- Фе) Ьх + cos (Фг, 6х) = 0. Учитывая, что cos (Фг, 6x) = cos30°sin45°, находим Р = пцх - тх 4- cos 30° sin 45° = О 6mJe-m(/6/4)- = P. (2) Для решения системы дифференциальных уравнений (1) и (2) из (1) определяем X = (4/Кб). I -f (4Ь/]/б т) • 1 - g 3. Подставляя это значение Jc в (2), получаем 3,75/6m-f4K6 Ь = Я--2/иКЗ. (3) Введем обозначения: 3,75/бт = й; AVb=\i; P2mY3g = h. Тогда уравнение (3) примет вид: а -f р = ft или I + (р/а) I = Л/а. (4) Общее решение этого дифференциального уравнения имеет вид: = Q+C,r"4(ftM) (5) Постоянные и определяем из начальных условий. При = 0 ё = Ео, 1о = 0. Следовательно, согласно (5) 1о = СЛ-Сг\ 0 = -(fx/«).C2-fft/fx, откуда Окончательно I = „ - (ah/ii) (1 - е-с/")) + (h/ii) L (6) Для того чтобы получить второе уравнение движения х = х{1), найдем из (2) . = (1/4Кб)-+Я/6т. Дважды дифференцируя (6), определяем, что = (/i/a) •е-/")-. Тогда X = (/1/а4 /6) • е- {i")- + P/6m или, учитывая, что « = 3,751/6 ш, J?= (/i/90m) • e-(t*/«)-< + P/6m, (7) Интегрируя (7), находим: i = (fta/90mp,) • e-d/)- + (P/6ffz) • + Q,; a: = {hamm\ji) e~ + (P/12m) • P + Ct + C4. (8) Согласно условию задачи при t = 0 хО, х = 0. Следовательно, 0 = -/1а/90тц + Сз; О =/ю/ЭОтр + С4. Отсюда Сз = /га/90тр; С4 = -/гаЭОтр, Подставляя эти значения постоянных в (8), получаем: Уравнения (6) и (9) являются решением задачи, УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА Задание Д-19. Применение уравнений Лагранжа второго рода к исследованию движения механической системы с одной степенью свободы К ведущему валу / механизма приложена пара сил, момент которой (вращающий момент) постоянен и равен Mi. К ведомому валу приложены силы сопротивления, создающие относительно оси постоянный момент Мц (момент сопротивления). Определить угловые ускорения ведущего и ведомого валов. В задании приняты следующие обозначения: Ша-з -масса каждого сателлита 2-3, состоящего из колес 2 и <3; У2-3 -оент инерции сателлита 2-3 относительно собственной оси; Jj -момент инерции 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 [ 102 ] 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 |