

|
|

|
Промышленный лизинг
Методички
Таблица 62
системы вертикальное отклонен соответствующего сгатической дс с (/ груза / от положения покоя, :{)Ормации пружины, имеем: d (дТ\ дТ dt дуj ду где Т -кинетическая энергия системы; Я - потенциальная энергия системы. Кинетическую энергию Т вычислим с точностью до величин второго порядка малости относительно обобщенной скорости у, а потенциальную энергию - с точ1гастыо до величин второго порядка малости относительно обобщенной координаты у. Найдем кинетическую энергию системы, равную сумме кинетических энергий тел 1, 2, 6 w 4: Т = Т, + Т, + Т,-\-Ти выразив линейные и угловые скорости, которыми определяется кинетическая энергия тел этой системы, через обобщенную скорость у. Кинетическая энергия груза /, движущегося поступательно со скоростью и = у: Кинетическая энергия блока 2 (сплошного однородного диска), вращающегося вокруг неподвижной оси Ох: Г2 = ЛлЮ/2. где ]гх=ЩГ212, u>2 = ij/r2, т. е. = (m,r]/2 2) • y/rl = m.f/A. Кинетическая энергия тонкого однородного стержня 6, жестко связанного с блоком 2 и вращающегося вокруг неподвижной оси Ох- Те = (6.-Мб)/2, где Jex = mei; Щ = Щ = У1Гг, т. е. так как /-2 = 4, то Га = 8ffZeyV3. Кинетическая энергия сплошного однородного диска 4, совершающего плоское движение, Ti = miVll2-\-Jcx\l2, где ]сх-=тг112. Скорость нентра тяжести диска н угловую скорость 0)4 можно определить следующим образом. Так как рассматриваются малые колебания, то а ввиду того, что диск катится без скольжения Vc = vnl2, следовательно, Vc = vaI2 = cufi 2 = ш., 2 = г /2г2 2(/, «4 = Vc/r = 2у1г. Подставляем значения Jcxs vc и a)i в выражение для Т. Ti = miiijV2 + тгЩ/Ац = nif. Таким образом, кинетическая энергия рассматриваемой механической системы Т = Ту+Т2 + Tfi + Г4 = m,f/2 + mJj/i + (8/3) m,f + Зту"- = = (1 /2) [mi + m2/2 + (16/3) m, + 6т\ tj". Найдем потенциальную энергию системы, которая определится работой сил тяжести системы и силы упругости пружины на перемещении системы из отклоненного положении, когда груз имеет координату у, в нулевое положение, которым считаем положение покоя системы: Я = Яг + Я„. Потенциальная энергия, соответствующая силам тяжести при указанном перемещении ni=-G,y-Geh, где Л-вертикальное смеще[не центра тяжести стержня 6, которое вычисляем с точностью до величин второго порядка малости относительно обобщенной координаты у. По рис. 241 h = ll2- {112) cos ф = {112) (1 - cos ф). 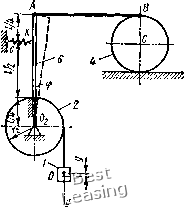 "7 / I I I Рис. 240 Рис. 241 Ограничиваясь в фор.муле разложения cosф=l-фV2! + фV4!-... двумя первыми членами и учитывая, что Ф = « Г2 = 4« /, имеем Л=( 2)•фV2 = (/4)() = 4г/V Таким образом. n, = -Giy-G,-AyVl. 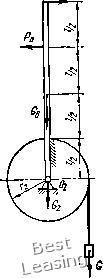 Рис. 242 Потенциальная энергия деформированной пружины при указанном перемещении системы равна: Я„=с(/,, + Ял-)/2-с/а/2, где/ст -статическая деформация пружины; Яд-- перемещение точки прикрепления пружины К, соответствующее координате у. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 [ 115 ] 116 117 118 119 120 121 122 123 124 125 126 127 128 129 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||