

|
|

|
Промышленный лизинг
Методички
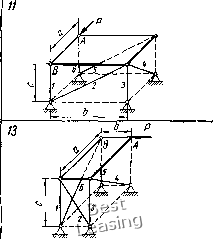  
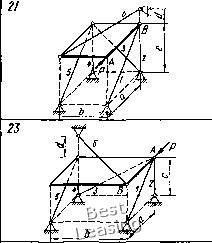    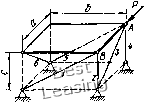 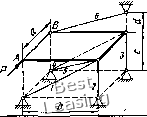
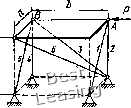 3» гая, что все стержни растянуты, направляем их реакции 5,, S, S3, S4, 5б, Se от узлов. Выбираем оси координат Oxyz так, чтобы эти оси пересекали наибольшее количество стержней. В этом случае уравнения равновесия получают наиболее простой вил. Дополним построение до прямоугольного параллелепипеда и введем углы (р, if, г\, Ь. Усилие 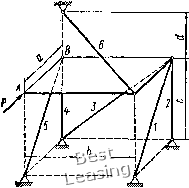 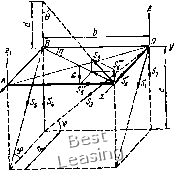 Рис. 65 Рис. 66 целесообразно разложить на три составляющих по координатным осям (см. рнс. 66); их модули: SH = SeSinesinTi; S6 = SeSinecosTi; Sr = SeCOse. Составляем шесть уравнений равновесия: 2Мь = 0; G-bl2 + S,b + Sf,s\nif-b = Q- (1) 2УИ,, = 0; С-а/2-5Га = 0; (2) SyW,-, = 0; -ЯЬ + 55СО8ф-й-5ба = 0; (3) 2А:, = 0; -Я + 51С08ф + 55С05ф-5б = 0; (4) 2У, = 0; -5зСО5г)-5б=0; (5) 22, = П; -0-5181пф-52-5з5пгз-4-5б8тф + 5Г = 0. (6) По заданным размерам вычисляем синусы и косинусы углов. с 4 ! sin ф = cos ф = sin г) = соь it- = \ ."-f 42 T 4Г 1/41 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 [ 21 ] 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||