

|
|

|
Промышленный лизинг
Методички
Продолжение табл. 21
Это выражение есть уравнение параболы. Для определения скорости точки находим проекции скорости на оси координат: o = i = 4 см/С; Vy = y31t см/с. Модуль скорости точки = /i + « (3) Аналогично проекции ускорения точки и) = = 0; Шу = ц = Ъ2 cм/c Модуль ускорения точки w = Vw% + wl32 см/с Координаты точки, а также ее скорость, ускорение и их проекции на координатные оси для заданного момента времени =1/2 с приведены в табл. 22. Таблица 22
Касательное ускорение находим путем дифференцирования модуля скорости (3): При ?=1/2 с dv 4.0+16.32 ,j Следовательно, модуль касательного ускорения ш = 31 см/с Знак «+» при dv/dt показывает, что движение точки ускоренное и, следовательно, направления и f совпадают. Нормальное ускорение точки в данный момент времени w„ = vw-wi = 1/32-312 - 7,94 т/с\ Радиус кривизны траектории в той точке, где при =1/2 с находится точка М, р = у2/ш„ = 16,57,94 = 34,3 см. Полученные значения ш, ш„ и р также приведены в табл. 22. Пользуясь уравнением (2), строим траекторию (рис. 72) и показываем на ней положение точки М в заданный момент времени. Вектор v строим по составляющим и vy, причем этот вектор долиен быть направлен по касательной к траектории точки. Вектор w находим как по составляющим и wy, так и по и w„, чем контролируется правильность вычислений. Дополнение к заданию /(-/. Уравнения движения точки на плоскости (табл. 21) можно использовать и для задания движения точки в пространстве, если дополнительно к табл. 21 задать третье уравнение z = z(t), которое приведено в табл. 23. Пример выполнения задания. Исходные данные (в см и с): 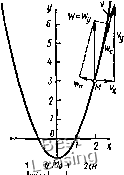 1/ = -4/-4; г = 2/ + 2; = 0. 7 а г h s 8 шм1с и..... Ill , , 5 О 5 1015 го iscnd Ш 111 I-1 Рис. 72 Решение. Уравнения (4) являются параметрическими уравнениями траектории точки в пространстве. Исключая параметр / из первого и второго уравнений этой системы, а также из второго и третьего, находим: ху = -\6; (5) y = -2z. (6) Уравнение (5) выражает в плоскости хОу равностороннюю гиперболу, для которой оси координат служат асимптотами. В пространстве этому уравнению соответствует гиперболический цилиндр с образующими, параллельными оси Ог. Таблица 21
Уравнение (6) выражает в плоскости уОг прямую, проходягцую через начало координат, а в пространстве - плоскость, содержагцую ось Од:, Траектория точки представляет собой линию пересечения этих двух поверхностен: гиперболического цилиндра и плоскости (рис. 73). 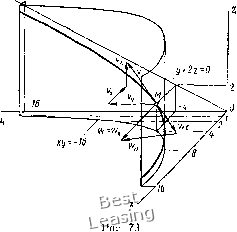 Проекции скорости точки на оси координат: v.--=x = v, = ij = - A см/с; V, = 2 = 2 см/с. см/с; Модуль cKopociH v= \ vl-\-vl-Ьу; = f 4-Ь5 (Н-1) см/с. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 [ 25 ] 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||