

|
|

|
Промышленный лизинг
Методички
колеса 4. Следовательно, СО = со Н- со ic,- OJ = fOi -h OD ; «с = «4 + "Ic • Заметим, что линии действия любых двух составляющих вектора (0 известны. Угловые скорости coi, со и о) направлены по оси Oz (рис. 135); coic -по оси 01,; coi и (Oj - соответственно по л[нпям Оа и Ob (по мгновенным осям вращения в относительном движе!1ии). Из произвольного полюса 0 (рис. 136) отложим в выбранном масштабе параллельно оси Oz векторы заданных угловых скоростей щ и coj. Через конец вектора coi проводим прямую KL, параллельную 0Z, (линии действия coic); из конца вектора со -прямую MN, параллельную Оа (линии действия (л. Точка пересечения этих прямых определяет конец вектора Шс, а также и м. Намерением на чертеже находим (О, = 100 с 1. Направление определяет положение мгновенной оси вращения сателлита 0Q (см. рис. 135). Для определения wn разложим со,, на две составляющие, направленные параллельно Ог и ОЬ. Полученные векторы представляют собой «[[(со) и Ш[1с((04,). Измерением на чертеже находим: 0)11 = 135 с-1. Направление a>yi соответствует положительному знаку угловой скорости соц, найденной способом Виллиса. РАЗДЕЛ ТРЕТИЙ ДИНАМИКА Задания по динамике тематическ[1 разделены на три группы: 1) динамика материальной точки (й заданий), 2) динамика механической системы (6 заданий), 3) аналитическая механика (14 заданий). Из четырех заданий первой группы, посвященных лИ(хЬере1щи-альным уравнениям движе1шя материальной точки, наиболее простым является задание Д-1, в котором рассматривается движение точки под действием постоянных сил. Остальные три задания требуют более глубокого знания теории дифференциальных уравнении. Во второй груг[пе гювышенную трудность представляют задания Д-7 и Д-12. Они могут быть отнесены к работа.м с элементами самостоятельного исследования. В третьей группе на каждую из тем даны задания различной сложности и трудоемкости. К числу сравнительно сложных следует отнести задания: Д-14, Д-16, Д-18, Д-20, Д-21, вторую часть задания Д-22, Д-24, Д-25, Д-26. Эти :адания требуют более глубокого знания теоретического материала и также содержат элементы самостоятельного исследования. L Динамика материальной точки ДИФФЕРЕНЦИА.:1ЬНЫЕ УРЛНПГНИЯ дви;к1шия МЛТЕРПАЛЫЮП точки Задание Д-1. Интегрирование дифференциальных уравнеппн движения материальной точкп, находящейся под действием постоянных сил Варианты 1-5 (рис. 137, схема 1). Тело движется из точки А по участку АВ (длиной /) наклонной плоскости, составляющей угол а с горизонтом, в течение т с. Его начальная скорость v,\. Коэффициент трения скольжения тела по плоскости равен /. В точке В тело покидает плоскость со скоростью d,j и попадяег со скоростью vq в точку С плоскости BD, наклоненной под углом к горизонту, находясь в воздухе Т с. 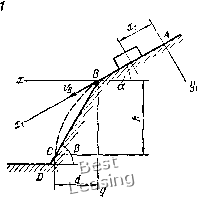 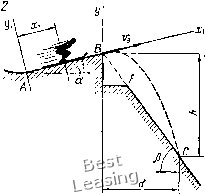 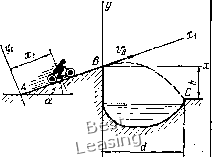 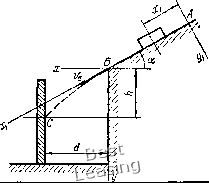 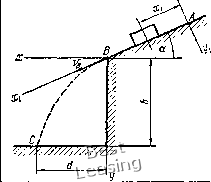 XX,- 777777777777777777. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 [ 51 ] 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 |