

|
|

|
Промышленный лизинг
Методички
ляющих, жестко скрепленного с рамой ВС, и приложим реакцию Хв (рис. 196). Возможное перемещение в этом случае -поступательное перемещение всей рамы, например, вправо на величину 6s (поворот ползуна в направлающих невозможен). Составим уравнение работ: - Pjcos 60°8s + X[i8s = Q, откуда Хв = 4-0,5 = 2 кН. Произведем теперь проверку правильности решения задачи. Убедимся, что найденные числовые значения величин удовлетворяют уравнениям равновесия сил для всей рамы (рис. 197) SV, = 0 и 2]Л,й = 0. Имеем: y,Yi = RA-Q-P,+ PzCOS 30° + Fb = = 4,25 - 6 - 2 + 4 • 0,87 + 0,29 = 8,02 - 8.00 0; Л4,й = -/?-8 + /W--Q.6 + Pi-2 + /2COs60°-5--.M„ = = - 4,25-8 + 5 + 6 •6 + 2-2 + 4 .0,5-5-21 =55-55-0. ПРИНЦИП ДЛЛЛМБКРА Задание Д-15. Применение принципа Даламбера к онределепию реакций связен Определить реакции внешних связей механической системы: а) в произвольный момент времени -для вариантов 4, 5, 10, 12-18, 2 -30 (рис. 198-200); б) в момент времени / = /i-для вариантов 1, 8, 9, 11, 20; в) в тот момент времени, когда угол поворота ф = ср1 -для вариантов 2, 3, 6, 7; г) в положении, показанном на чертеже для вариантов 15 и 19. На схемах (рис. 198 - 200) плоскость хОу (хАу) горизонтальна, плоскость уОг (уАг) вертикальна. Необходимые для решения данные приведены в табл. 56, в которой ш - угловая скорость, фо и - значения угла поворота и угловой скорости в начальный момент времени. Пример выполнения задания. Дапо: mi = 3; 2 = 2; /?гз = 5кг; li = 30; k = 20 см; а = 30°; со = 120 с- = const. Схема системы и необходимые размеры приведены на рис. 201, а. Найти реакции подпятника А, подшшшикаВ, а также пружины DN. Поперечными размерами стержней 1, 2 н 3 и массой пружины пренебречь. Решение. Для определения реакцш! связей воспользуемся принципом Датамбера. Так как оз = const, рассмотрим только центробежные силы [терции частиц каждого стержня. Извест1ю, что главный вектор сил инерции точек вращающегося тела определяется 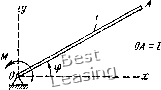 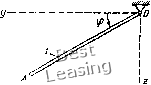  OA = l  OA=-l OA=l 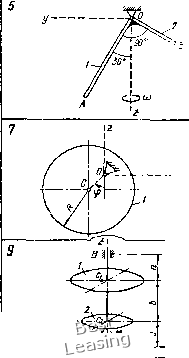 ОС = /2 i=2a=P,St 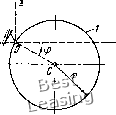  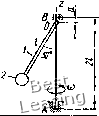 a=OJl ---- I. Phc. 198 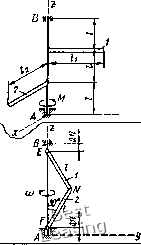  а =0,11 CE = NE АВ=21 /5 12  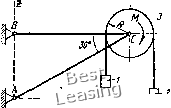 АВ=1 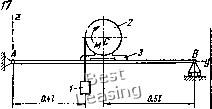  ОП=1=А0 0В=0,21  ON =21 АЕ=ЕО=ОВ 77/7/7 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 [ 92 ] 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 |